

| |
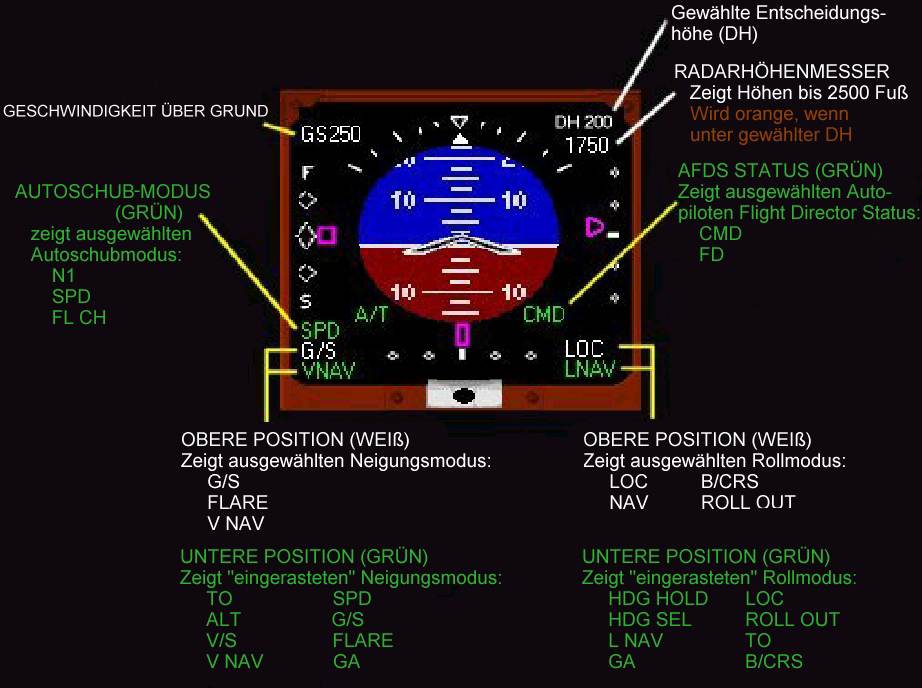
| EADI Zusammenfassung Programmierung/Design von Crenier. Grafiken/Design von Ernst. Oben abgebildet ist ein Überblick über die Anzeigen, die man auf dem EADI finden kann. Wie man sehen kann, wird eine Menge an Informationen auf kleinem Platz dargestellt. Alle Anzeigen stellen den aktuellen Status des Flugzeugs und die Autopiloteinstellungen dar. AFDS (Autopilot Flight Director Status) Status Seiten-Modi Die Anzeige ROLL OUT hängt mit der Autolandungsfähigkeit des Flugzeugs zusammen. Wenn man sich in einem CAT II oder CAT III Anflug befindet und man die Autolandungsfunktion "Land 2" oder "Land 3" ( wird später noch erklärt ) benutzt, erscheint die Anzeige ROLL OUT. Sie zeigt an, wann das Flugzeug bereit ist (weiß) oder dabei ist (grün), die Ausrollprozedur auf der Landebahn auszuführen. Aus Platzgründen erscheint die ROLL OUT-Anzeige in der Simulation als R OUT. Vertikale Modi Die FLARE-Anzeige hängt mit der Autolandungsfähigkeit des Flugzeugs zusammen. Wenn man sich in einem CAT II oder CAT III Anflug befindet und man die Autolandungsfunktion "Land 2" oder "Land 3" ( wird später noch erklärt ) benutzt, erscheint die Anzeige FLARE, die anzeigt, wann das Flugzeug bereit ist (weiß) oder dabei ist (grün), das Flare-Manöver (Überzieh-Manöver) auszuführen. Zusätzlich zeigt die Autoschubanzeige während des Manövers IDLE (Leerlauf) an. Autoschub Modi Radarhöhenmesser Geschwindigkeitsabweichungsskala Kursabweichungsanzeige (CDI - Course Deviation Indication) und Gleitpfadskala Landebahnannäherungsanzeiger  | |
 | Flight Director Programmierung von Crenier. Dieser Flight Director arbeitet zu 100% wie ein echter Flight Direktor. Nicht so wie die Flight Direktor-Funktionen
in den vorangegangen Panels von Eric, muß dieser an- bzw. ausgeschaltet werden. Man muß nicht mehr zwischen
verschiedenen Modi hin- und herschalten, da er so programmiert wurde, daß er weiß in welchem Modus sich
der Autopilot sich derzeit befindet und den Flug entsprechend dieser Einstellung zu leiten. Auch die Richtungs-
und vertikalen Modi funktionieren zu 100% korrekt wie auch die Leitung des Fluges in irgendeinem Navgationshilfe-Modus
(z.B. NAV, APP, B/C). |
 | Der Neigungswinkelbalken (horizontale Linie) Wenn Sie sich die Bilder links näher anschauen, werden Sie bei den oberen Bildern den Neigngswinkelbalken
nicht in der Mitte vorfinden. Das heißt, daß Sie den Neigungswinkel des Flugzeugs zu diesem Balken hin
verändern müssen, bis dieser sich in der Mitte befindet ... und ihn dann dort ständig halten, um
auf dem im Autopiloten eingestellten vertikalen Kurs ("Höhe halten", steigen oder sinken mit entsprechender
Steig/Sinkgeschwidigkeit) zu bleiben. |
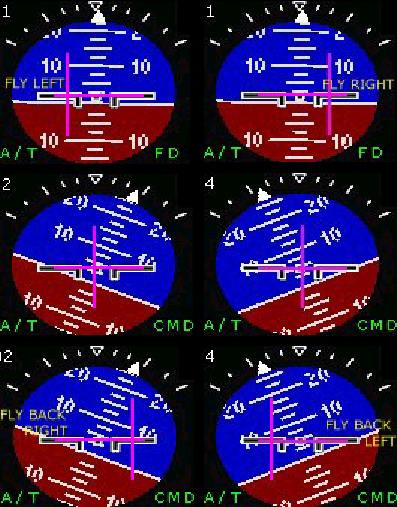 | Der Rollwinkelbalken (vertikale Linie) Links ist zu sehen wie der Rollwinkelbalken eine Rollbewegung leitet und wie es aussieht, wenn man die geforderte Rollbewegung ausführt. Wenn man in die geforderte Richtung fliegt, der vertikale Balken in der Mitte. Wenn sich der Balken bewegt, muß man mit dem Flugzeug eine Kurve auf den Balken zu fliegen, bis dieser wieder zentriert ist. Wenn man den Balken in der Mitte hält, fliegt man in die vom Autopiloten geforderte Richtung. Im oberen linken Bild fordert der Autopilot eine Linkskurve. In diesem Fall dreht man das Flugzeug nach links, bis der vertikale Balken wieder in der Mitte steht. Dies wird im mittleren linken Bild gezeigt. Wenn man den vertikalen Balken zentriert hält, stellt man so sicher, daß man den vom Autopiloten gewünschten Kurs fliegt. Das untere linke Bild zeigt, daß der Autopilot eine Rechtsdrehung fordert, so daß sie nach rechts drehen müssen, bis der vertikalen Balken sich wieder in der Mitte befindet. Die Bilder rechts zeigen das selbe Szenario mit einer geforderten Linkskurve. |
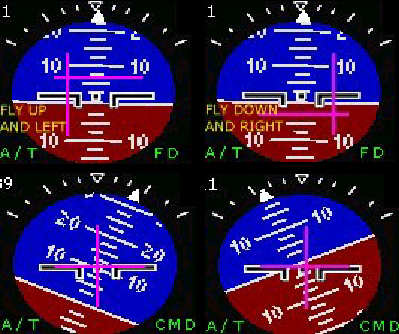 | Beispiele Hier nun einige Beispiele wie sich zwei Balken bewegen. Das obere rechte Bild zeigt, wie der Autopilot eine Linkskurve mit gleichzeitigem Steigflug fordert. Das Ziel ist es beide Nadeln in die Mitte zu bringen, so daß man nach links drehen muß und den Bug gleichzeitig etwas hochnehmen muß. Ein ähnliches Beispiel wird rechts gezeigt, nur daß hier eine Rechstskurve mit gleichzeitgem Sinkflg gefordert wird. Ebenso ist auch hier das Ziel beide Nadeln zu zentrieren, so daß man nach rechts drehen und gleichzeitig den Bug des Flugzeugs etwas senken muß, bis die beiden Nadeln wieder in der Mitte zentriert sind. |
Diese Seite wurde von Markus Beier erstellt. Sie wurde das letzte Mal am 10.07.1999 aktualisiert.